About Me
As a Research Scientist and group leader at Disney Research, I am deeply passionate about solving real-world problems in computational robotics, fabrication, and architecture.
My core expertise is the development of differentiable simulators to tackle complex design, control, and characterization problems in (soft) robotics, architecture, and computer graphics.
More specifically, I model rigid and flexible multibody systems kinematically, quasi-statically, and dynamically, and utilize the differentiability of the simulators to (1) numerically optimize design, control, and material parameters, or to (2) learn control strategies if stochasticity is present in the modeling task.
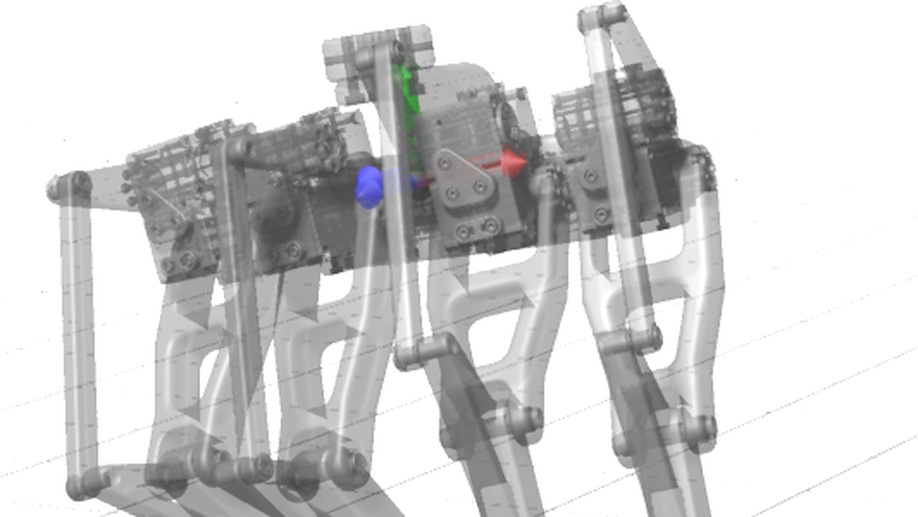
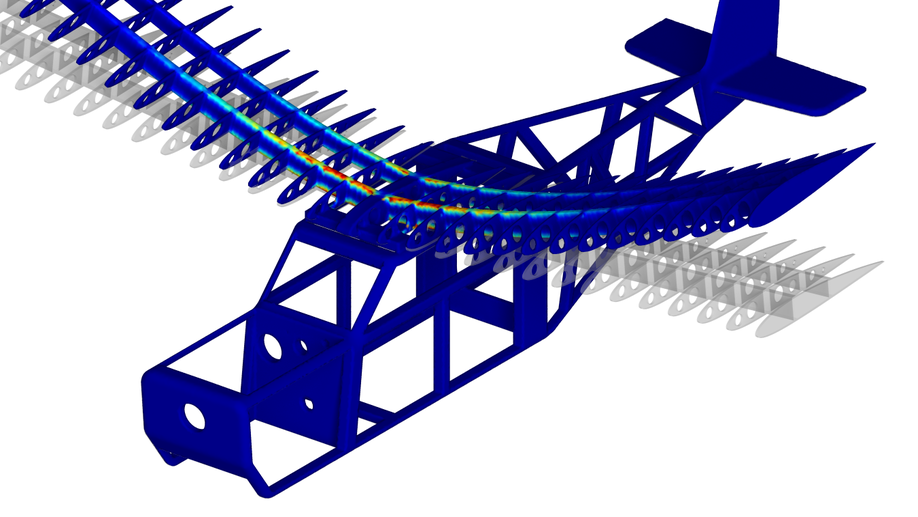
Most recently, I have developed differentiable simulators for the design of proprioceptive soft robots, the equilibrium-constrained shape optimization of CAD models, the vibration-minimizing animation of robotic characters, and the structural optimization of architectural-scale models under worst-case loads.
Send me a note if you are interested in an internship in my group.
Interests
- Computational Robotics, Fabrication, and Architecture
- Computational Design, Control, and Characterization Problems
- Differentiable Kinematics and Dynamics of Flexible Multibody Systems
- Automated Soft Sensor and Actuator Design
- Shape and Structural Optimization
- Mechanism Design
Education
-
PhD in Computer Science
Harvard University
-
Master in Computer Science
ETH Zurich